← Back to project
Morphogenesis-Inspired Reconfigurable Robots in Aquatic Environments
CREATE Lab, EPFL
Taking inspiration from morphogenesis, adhesion, and de-adhesion in nature,
this project explores how to change the configuration of floating objects in aquatic environments.
Approach
- Floating object behavior is stochastic. By leveraging grouping probabilities, Markov chains can be used to control configuration while taking advantage of the environment.
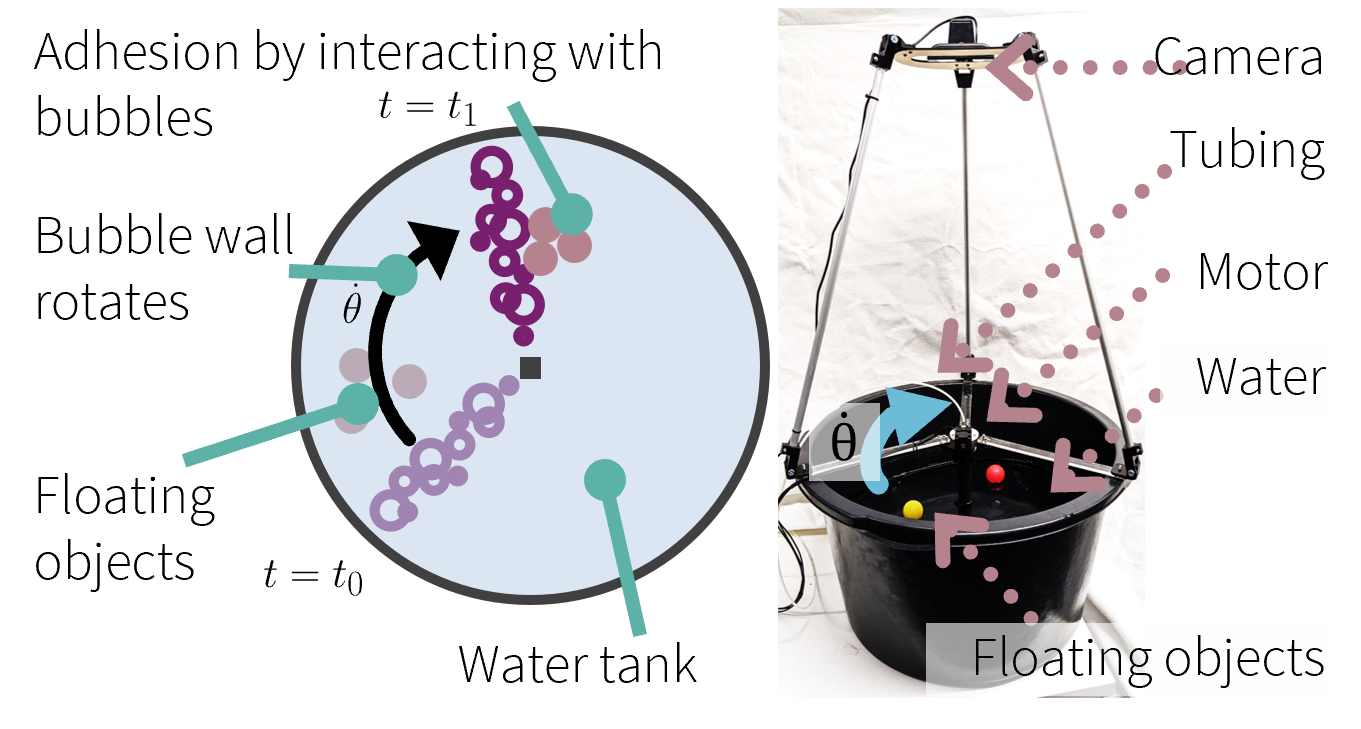
Experimental setup
- Bubble wall rotation controlled in speed and position.
- Computer vision to track the object trajectory.
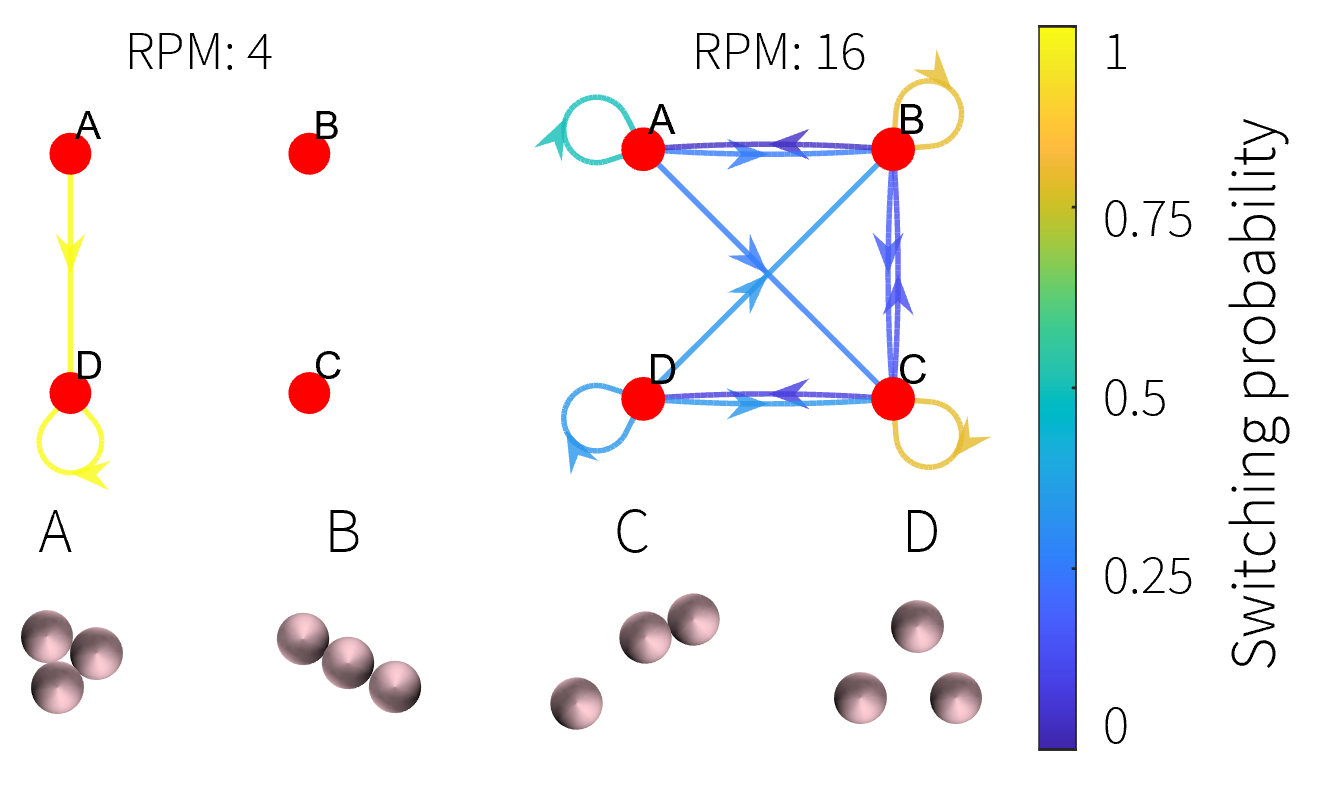
Understanding object behavior
- Extracted state-transition probability matrices from experimental time series as a Markov chain.
- Selected control strategies based on the greatest probability of reaching the goal state.
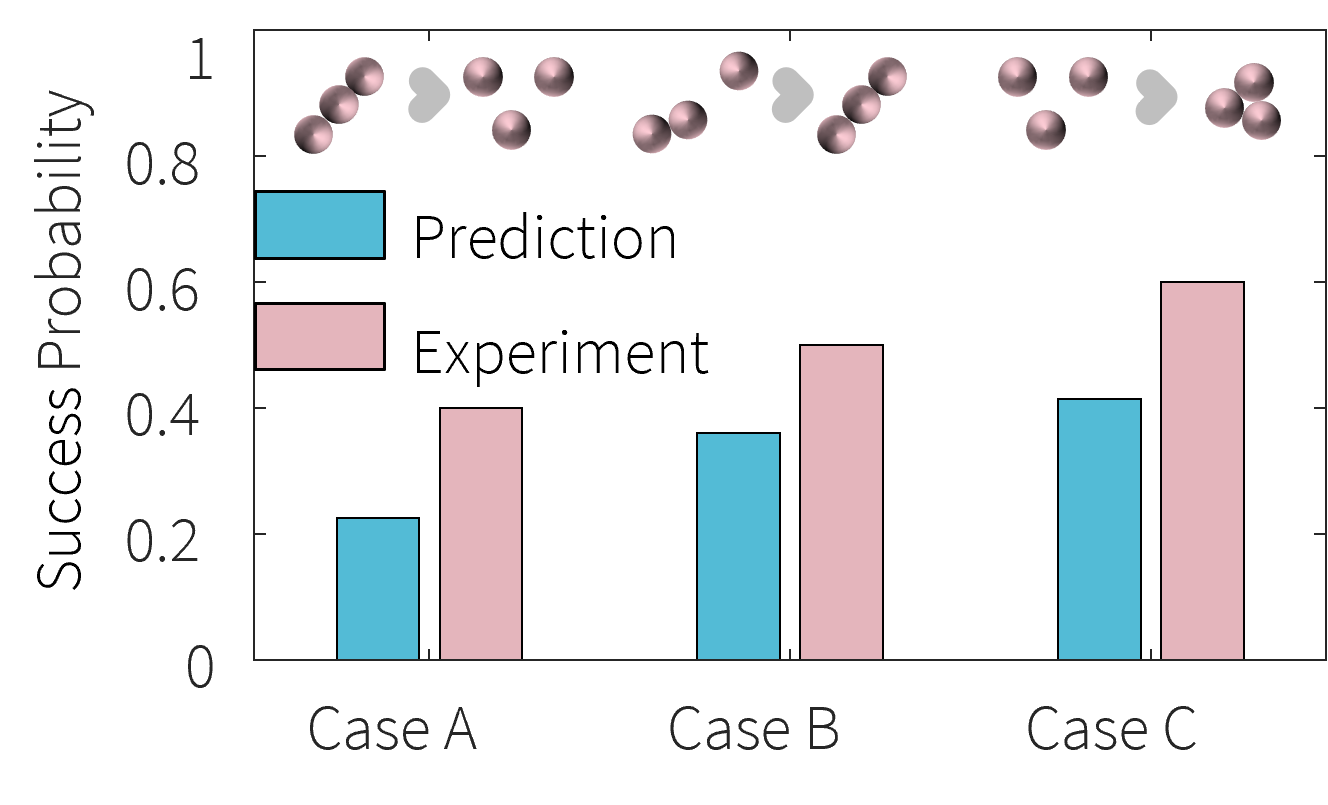
Results
- Successful state transition from start to goal states.
- Experimental results followed the predicted trend.